
As a part of my MSc thesis, I have introduced a novel UAV configuration based on the Moving Mass Control (MMC) mechanism. MMC has so many benefits, one can mention:
- No annoying aerodynamic effects, because of placing actuators inside the body
- Lower energy consumption
- Greater payload capacity
- Higher maneuverability
- Low cost
Applications of Moving Mass Control
MMC has been widely used in underwater vehicles, submarines and re-entry vehicles, but it has been rarely used in multirotors, there are two example which use MMC in monorotor and quadrotor configurations.
Moving Mass Controlled Bi-Rotor UAV Concept
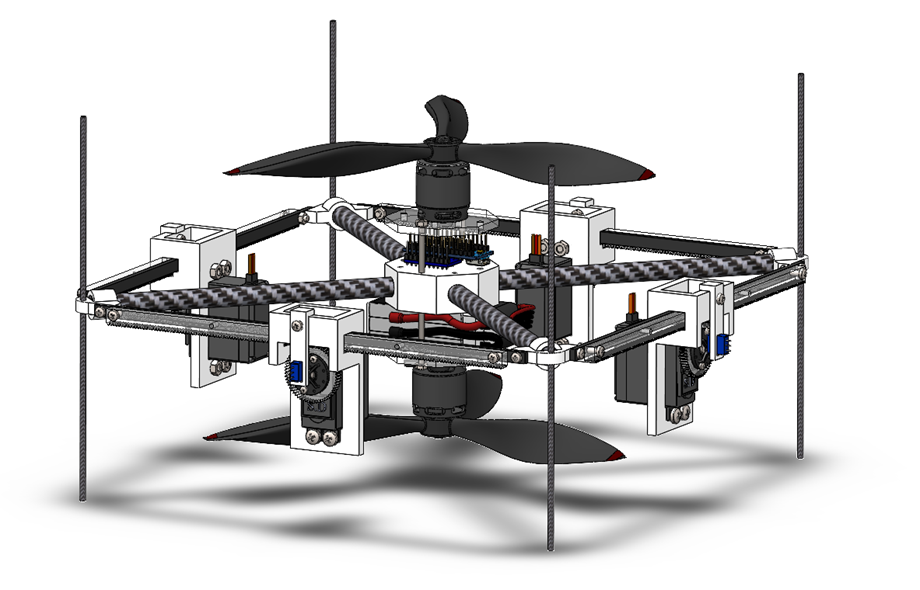
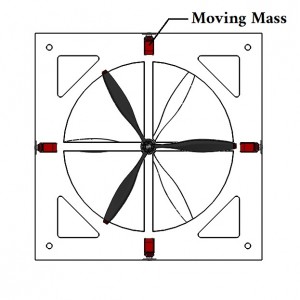
The main idea is to control the attitude of the UAV by controlling the Center of Gravity (CoG). This can be reached by using four moving masses. In our concept, we use two co-axial rotors which are rotating in the opposite direction of each other, at the center of a square frame and four moving masses on four sides of the frame according to following figure.
We use a pair of Clockwise (CW) and Counter Clockwise (CCW) propellers, in order to eliminate reaction torques produces by each rotor (and propeller).
Moving Mass Mechanisms
There are different mechanisms for moving the masses, including reels, rails, straps, and gears, in this concept we use rack and pinion mechanism which is controlled by a servo motor. This mechanism is fast enough, inexpensive and easy to run, and we can consider its dynamics as a first-order system.
Different Motions
The yaw angle is controlled by creating a differential angular velocity of Δω between two rotors, and only roll and pitch angles are controlled by moving the CoG. By moving the masses in X, Y direction, the lift force of two rotors will produce a torque about CoG which causes the UAV to rotate and enables us to control the UAV, different motions of this UAV is illustrated in the following figure.
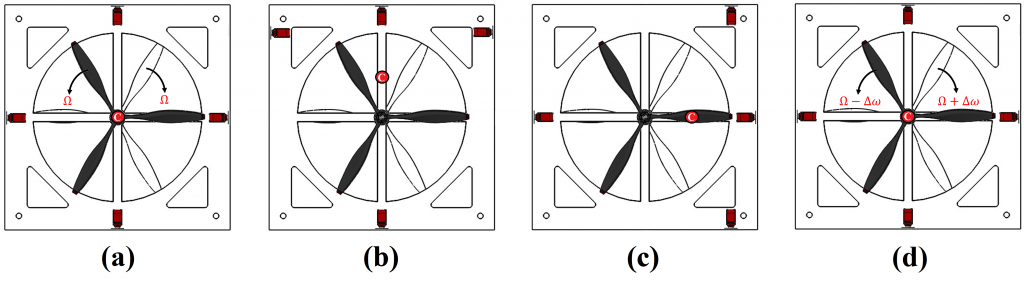
a)attitude control b)pitch control c)roll control d)yaw control
Mathematical modeling, simulation, PID controller design, LQR controller design, MPC controller design, Sliding mode controller design and Neural feedback controller design of this UAV is studied as parts of my thesis.
Published Paper
Two papers have been published based on this concept so far, one of them is about the Mathematical Modeling of this drone which is published in Aerospace Science and Technology (vol 107, you can read it here), and another is about Model Predictive Controller design for this type of drone that is published in the Journal of Control in Persian(you can download it here).
Suggestions for Future Works
There are some possible researches which can be done on this concept, for example:
- Comparing different moving mass mechanism with a control, stability and maneuverability approach
- Optimizing the mass of the moving masses with a control, stability and maneuverability approach
- Studying different moving paths like curve and circular paths
- Designing another types of controllers specifically nonlinear constrained controllers
Source Codes
All of the outputs of this project including ready to 3D print CAD files, a 6DOF Simulink model with 3D Simulation of the drone, and source files for a simple experimental 1DOF Test-Bed are available in the git repository of the project.