
Model predictive control is an advanced method of process control that is used to control a process while satisfying a set of constraints.
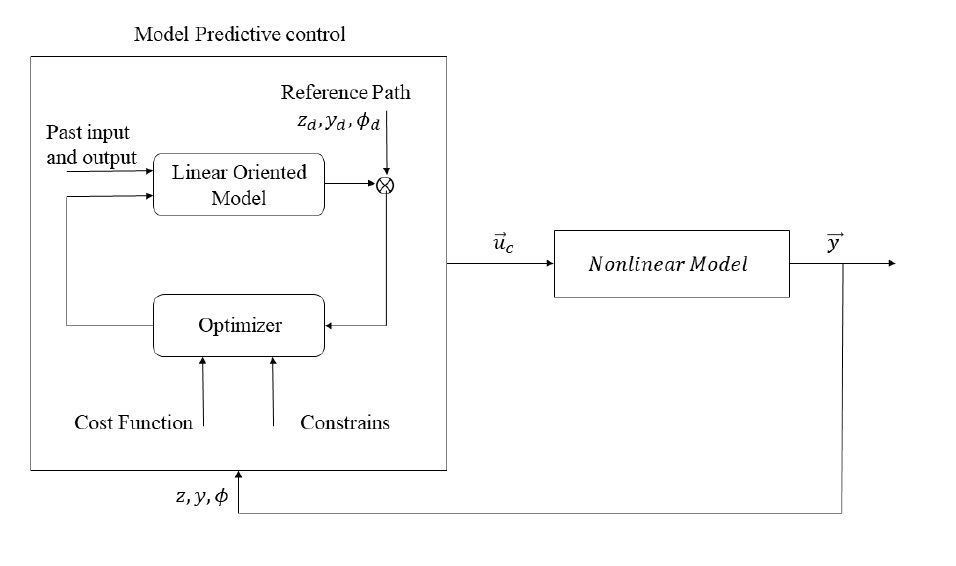
This is what you can find if you search for an MPC in Google if fact MPC is considered as an optimal control that uses the linear or nonlinear model of the system to predict the behavior of the system in the future, based on this prediction or estimation, the control is designed. the simplicity of the MPC and its ability to consider the control constraints have made it a popular controller among engineers. In most cases, the MPC problem can be simplified as a simple linear QP which is easy to solve, in fact, MPC is as simple as the LQR but with a different cost function. Different versions of the MPC have been developed so far, including nonlinear MPCs, Robust MPCs, ANN powered MPC and so on.
If you are interested in the Model-Based Predictive Controller, I invite you to kindly check our latest papers.
Model Predictive Controller Design for a Novel Moving Mass Controlled Bi-rotor UAV
This paper presents the design and implementation of a Model-Based Predictive Controller (MPC) for a novel Bi-Rotor Moving Mass Controlled (MMC) Unmanned Aerial Vehicle (UAV). Due to the strictly constrained control inputs in this type of UAV, it is necessary to take into account the constrained controller design and un-constrained control methods are not applicable. MPC controller which is designed based on the linear model by considering control constraints is implemented on the nonlinear model of the UAV’s planar motion and compared with the LQR controller, the simulation results show the significant performance of this controller in control of the UAV while respecting control constraints. (download)
Model Predictive Control Based on Intelligent model for Low Earth Orbit Satellite
In this paper, an Orbit Control algorithm is implemented to correct satellite’s position for Low Earth Orbit (LEO) satellites using Artificial Neural Networks, Model-based Predictive Control, and Linear Quadratic Regulator . as a Self Tuning Regulator structure, an Artificial Neural Networks is used to learn the model of the satellite and compute satellite’s Dynamics and Parameters with external disturbances, after extracting a linear and nonlinear online model based on Artificial Neural Networks model, we used both Linear Quadratic Regulator and Model predictive Control controllers to keep and correct the satellite in its orbit and correct the satellite’s position. (download)